Creating a hand skeleton and rig in Blender can be a time-consuming process, especially when done manually. However, with the power of Blender scripting and Python, this task can be automated, saving time and ensuring precision. In this blog, we’ll explore a Python script designed to generate a hand skeleton and rig in Blender, perfect for animators and 3D artists looking to streamline their workflow.
What Does the Script Do?
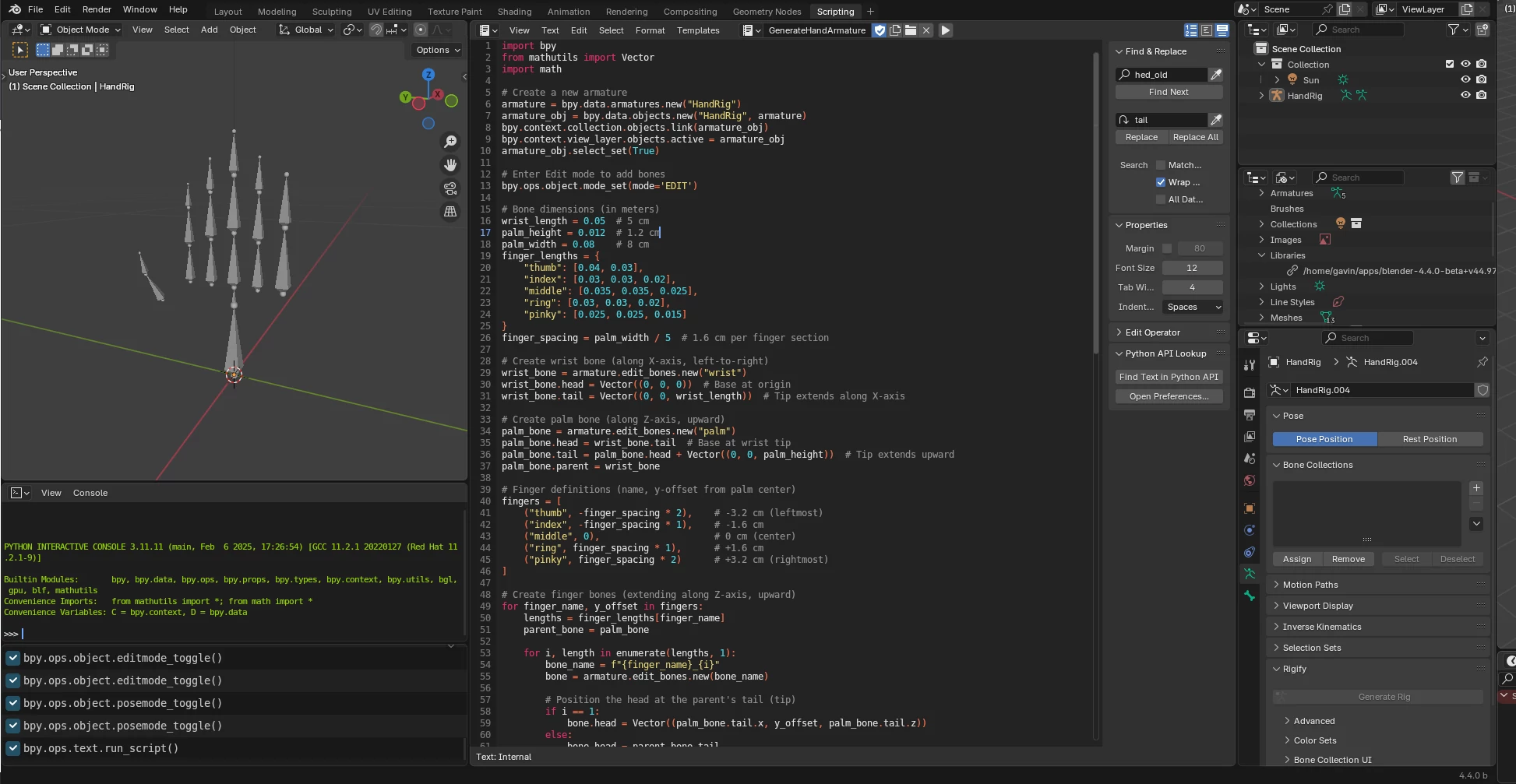
The script automates the creation of a hand rig in Blender, complete with a wrist, palm, and fingers, including the thumb. It uses Blender’s Python API to define the structure of the hand skeleton, ensuring that each bone is correctly positioned and connected. Here’s a breakdown of its functionality:
- Armature Creation:
- The script starts by creating a new armature object, which serves as the foundation for the hand skeleton. This armature is named “HandRig” and is automatically linked to the current Blender scene.
- Bone Structure:
- The script defines the dimensions of the hand, including the wrist, palm, and fingers, using real-world measurements (in meters). These dimensions ensure that the generated skeleton is anatomically accurate.
- The wrist bone is created along the Z-axis, extending upward from the origin. This bone serves as the root of the hand skeleton.
- The palm bone is attached to the wrist and also extends upward along the Z-axis, forming the base for the fingers.
- Finger Generation:
- The script generates five fingers (thumb, index, middle, ring, and pinky) with their respective bone segments. Each finger is composed of multiple bones, connected end-to-end, mimicking the natural structure of a human hand.
- The thumb is given special treatment, with its bones angled inward and upward to replicate its unique position on the hand.
- Parenting and Alignment:
- Each bone is parented to the previous one, ensuring that the skeleton is properly connected. For example, the palm bone is parented to the wrist, and each finger bone is parented to the preceding bone in the chain.
- The script also applies a slight roll to the finger bones, giving them a natural tilt that matches the curvature of a real hand.
- Rotation Constraints:
- To make the rig animation-ready, the script adds rotation constraints to the finger and thumb bones. These constraints limit the range of motion for each bone, preventing unnatural poses and ensuring realistic movement.
- Ease of Use:
- The script is designed to be executed in Blender’s scripting editor. Once run, it automatically generates the hand rig in the 3D viewport, ready for use in animations or further customization.
Why Use This Script?
This script is a powerful tool for anyone working with hand rig generation in Blender. By automating the process, it eliminates the need for manual bone placement, saving time and reducing the risk of errors. Whether you’re creating a character rig for animation or experimenting with Blender scripting, this script provides a solid foundation for your projects.
Conclusion
Blender’s Python API opens up endless possibilities for automating complex tasks, and this hand skeleton generation script is a perfect example. By leveraging Blender scripting, you can create detailed and anatomically accurate rigs with minimal effort. Whether you’re a seasoned animator or a beginner exploring Blender’s capabilities, this script is a valuable addition to your toolkit. Try it out and see how it can enhance your workflow!
import bpy
from mathutils import Vector
import math
# Create a new armature
armature = bpy.data.armatures.new("HandRig")
armature_obj = bpy.data.objects.new("HandRig", armature)
bpy.context.collection.objects.link(armature_obj)
bpy.context.view_layer.objects.active = armature_obj
armature_obj.select_set(True)
# Enter Edit mode to add bones
bpy.ops.object.mode_set(mode='EDIT')
# Bone dimensions (in meters)
wrist_length = 0.05 # 5 cm
palm_height = 0.012 # 1.2 cm
palm_width = 0.08 # 8 cm
finger_lengths = {
"thumb": [0.04, 0.03],
"index": [0.03, 0.03, 0.02],
"middle": [0.035, 0.035, 0.025],
"ring": [0.03, 0.03, 0.02],
"pinky": [0.025, 0.025, 0.015]
}
finger_spacing = palm_width / 5 # 1.6 cm per finger section
# Create wrist bone (along X-axis, left-to-right)
wrist_bone = armature.edit_bones.new("wrist")
wrist_bone.head = Vector((0, 0, 0)) # Base at origin
wrist_bone.tail = Vector((0, 0, wrist_length)) # Tip extends along X-axis
# Create palm bone (along Z-axis, upward)
palm_bone = armature.edit_bones.new("palm")
palm_bone.head = wrist_bone.tail # Base at wrist tip
palm_bone.tail = palm_bone.head + Vector((0, 0, palm_height)) # Tip extends upward
palm_bone.parent = wrist_bone
# Finger definitions (name, y-offset from palm center)
fingers = [
("thumb", -finger_spacing * 2), # -3.2 cm (leftmost)
("index", -finger_spacing * 1), # -1.6 cm
("middle", 0), # 0 cm (center)
("ring", finger_spacing * 1), # +1.6 cm
("pinky", finger_spacing * 2) # +3.2 cm (rightmost)
]
# Create finger bones (extending along Z-axis, upward)
for finger_name, y_offset in fingers:
lengths = finger_lengths[finger_name]
parent_bone = palm_bone
for i, length in enumerate(lengths, 1):
bone_name = f"{finger_name}_{i}"
bone = armature.edit_bones.new(bone_name)
# Position the head at the parent's tail (tip)
if i == 1:
bone.head = Vector((palm_bone.tail.x, y_offset, palm_bone.tail.z))
else:
bone.head = parent_bone.tail
# Set the tail along Z-axis (upward)
bone.tail = bone.head + Vector((0, 0, length))
# Parent to the previous bone or palm
bone.parent = parent_bone
parent_bone = bone
# Create thumb (angled inward from near the wrist)
thumb_bone_1 = armature.edit_bones.new("thumb_1")
thumb_bone_1.head = Vector((-0.01 ,finger_spacing * 3, wrist_length)) # Base near wrist
thumb_bone_1.tail = thumb_bone_1.head + Vector((-0.01, 0.005, 0.02)) # Tip angles inward and upward
thumb_bone_1.parent = wrist_bone
thumb_bone_2 = armature.edit_bones.new("thumb_2")
thumb_bone_2.head = thumb_bone_1.tail
thumb_bone_2.tail = thumb_bone_2.head + Vector((-0.005, 0, 0.015)) # Continue upward
thumb_bone_2.parent = thumb_bone_1
# Align bones (slight tilt for fingers)
for bone in armature.edit_bones:
if "thumb" in bone.name:
pass
elif any(finger in bone.name for finger in ["index", "middle", "ring", "pinky"]):
bone.roll = math.radians(5)
# Exit Edit mode
bpy.ops.object.mode_set(mode='OBJECT')
# Add rotation constraints
bpy.ops.object.mode_set(mode='POSE')
for bone in armature_obj.pose.bones:
if "thumb" in bone.name or any(finger in bone.name for finger in ["index", "middle", "ring", "pinky"]):
limit_rot = bone.constraints.new(type='LIMIT_ROTATION')
limit_rot.use_limit_x = True
limit_rot.min_x = math.radians(-10)
limit_rot.max_x = math.radians(90)
limit_rot.use_limit_y = True
limit_rot.min_y = math.radians(-20)
limit_rot.max_y = math.radians(20)
limit_rot.use_limit_z = True
limit_rot.min_z = math.radians(-30)
limit_rot.max_z = math.radians(30)
limit_rot.owner_space = 'LOCAL'
# Return to Object mode
bpy.ops.object.mode_set(mode='OBJECT')
print("Hand rig created successfully!")